技术特点
-
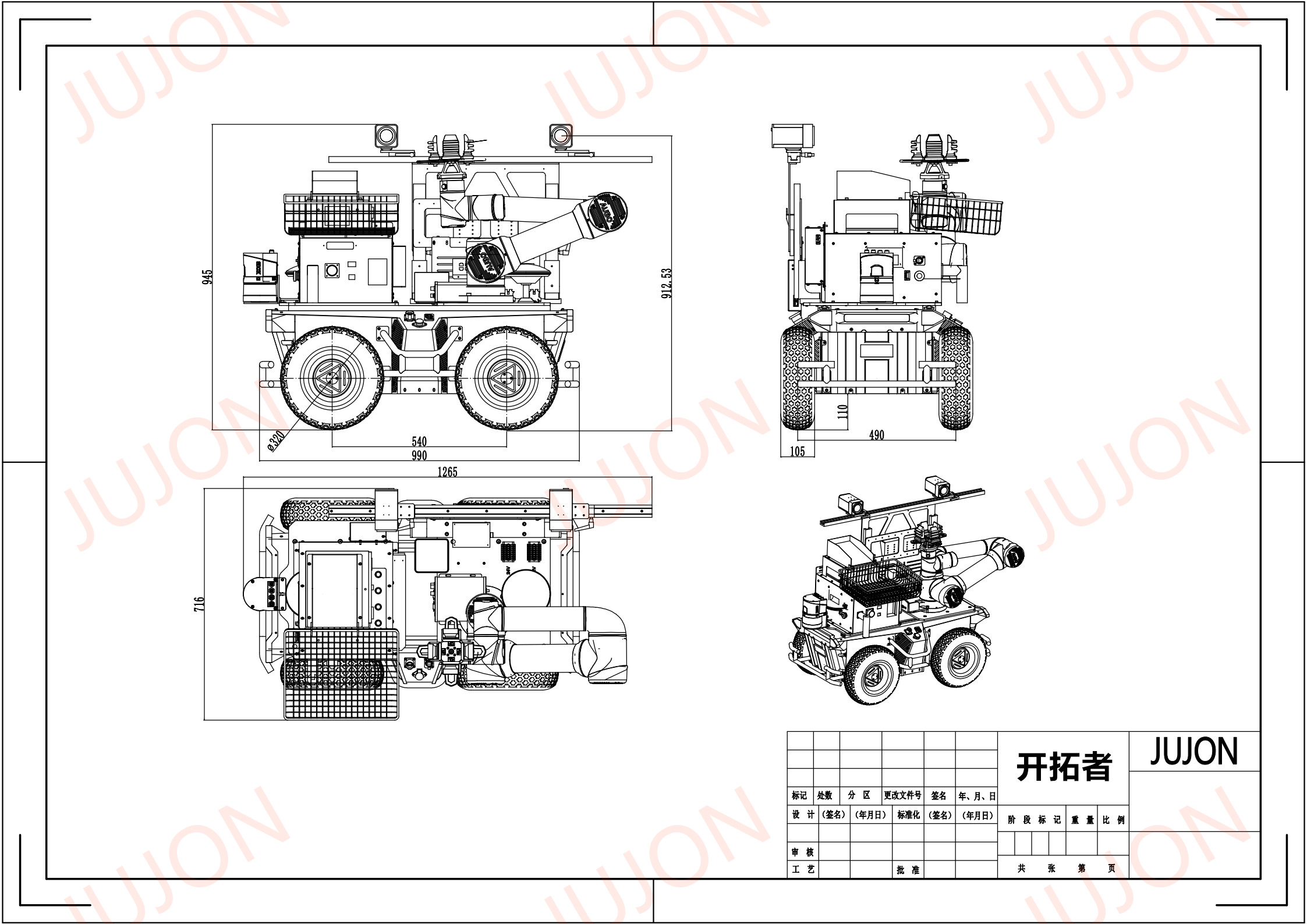
远程操控:采用“灵动”移动平台,配备4G模块,可通过键盘、手柄或其他输入设备进行远程控制,机器人接收到控制命令后即可完成相应动作,比如转向、调整速度等
-
自主导航定位:客户根据需要可搭载激光雷达、RTK传感器,通过GPS-RTK定位技术,结合slam路径规划技术,实现机器人在测试环境中自主定位导航、自主路径规划
-
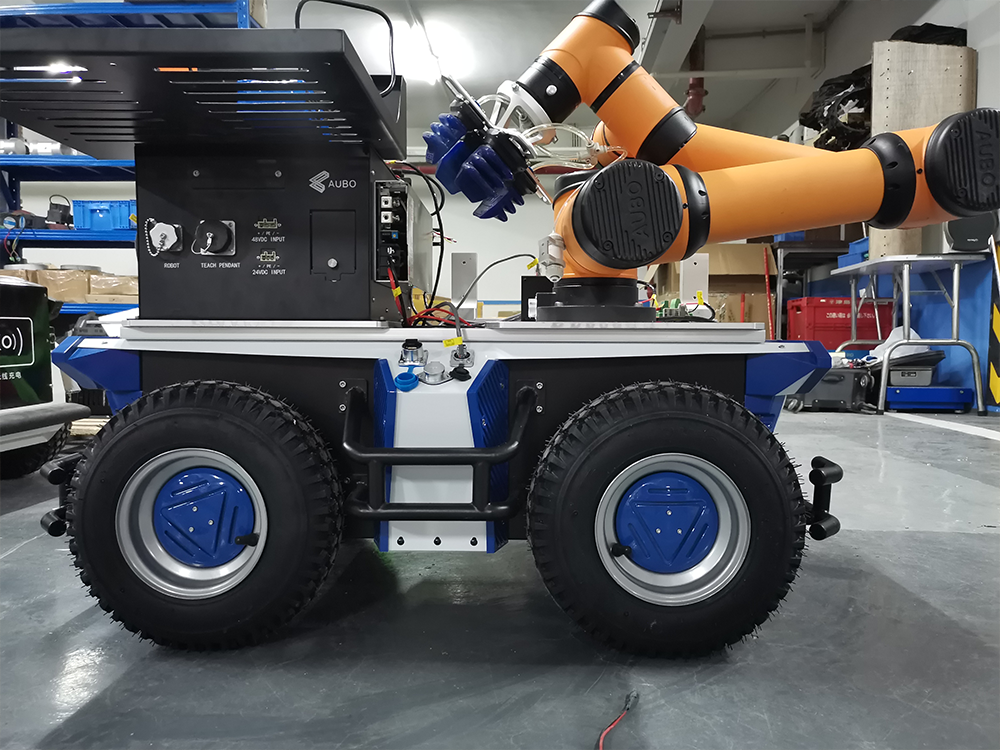
精准识别:搭载3D视觉传感器,并通过第三方视觉软件系统(OpenCV),机器人可以通过视觉传感器识别目标物体的颜色和形状,并提供实时的视觉信息反馈
-
机械手臂运动规划:封装并集成机械臂的通信协议,并能根据物体的不同形状确定合适的抓取方式及放置到指定位置,从而实现对机械臂的精准控制
......