技术特点
-
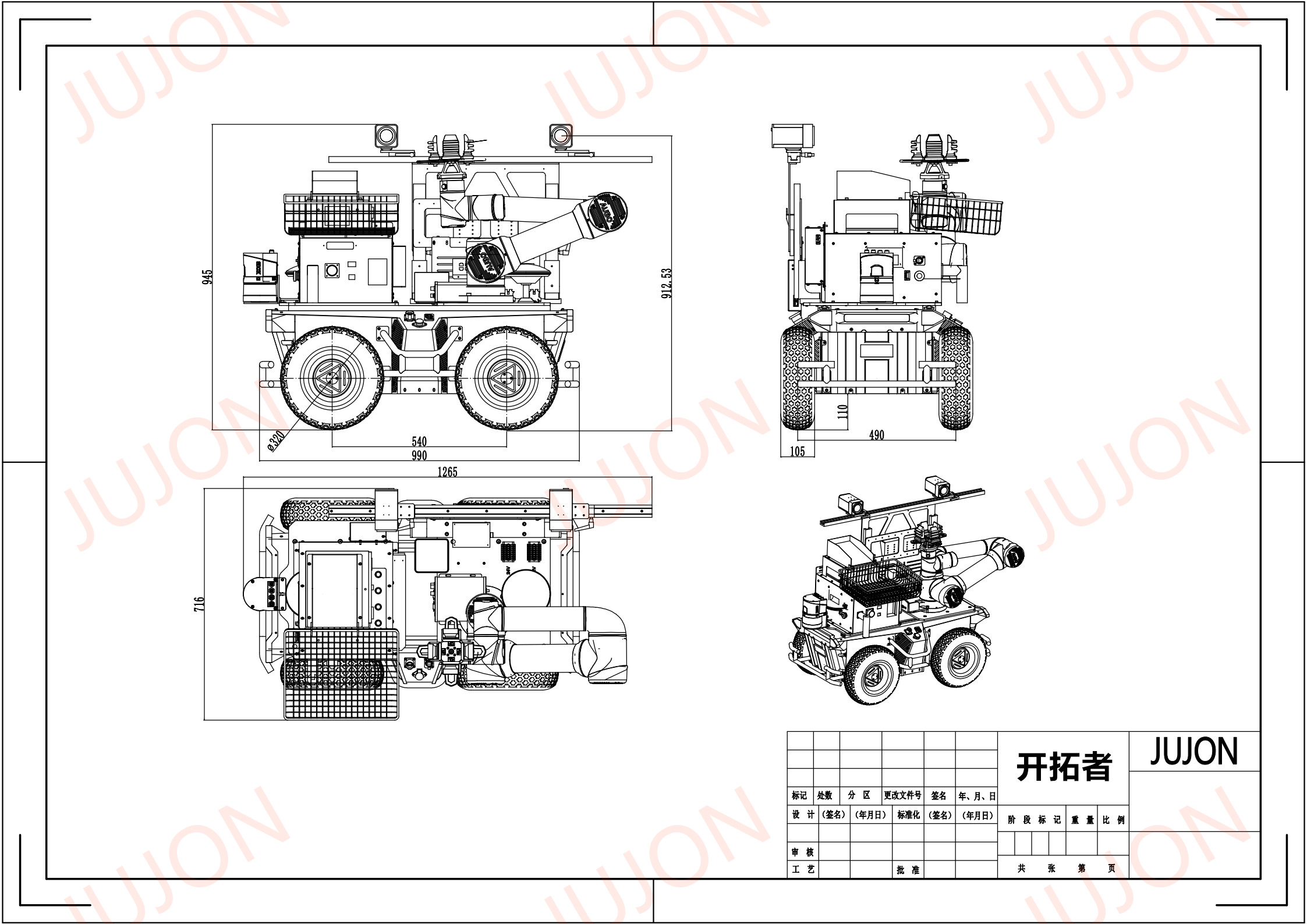
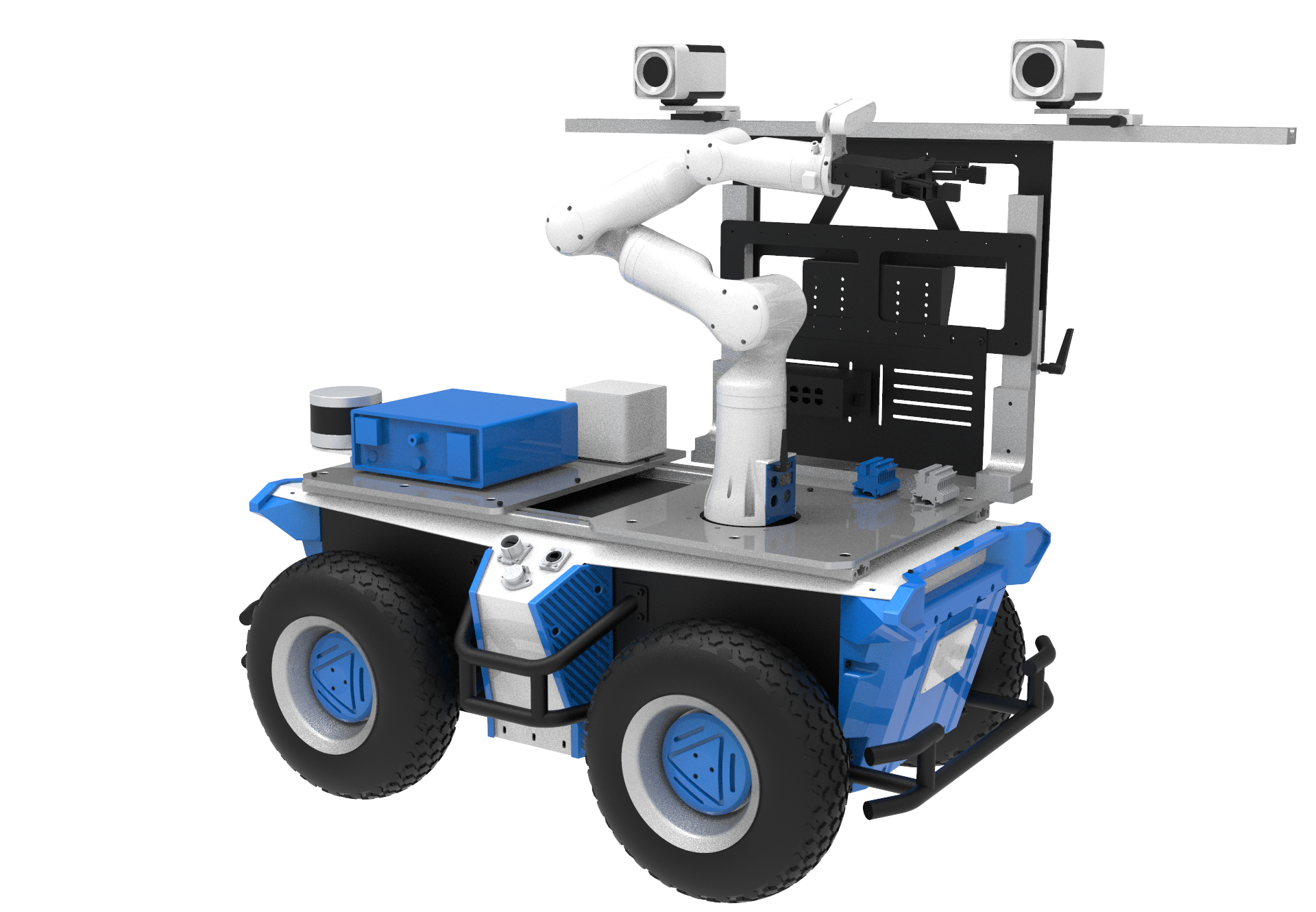
由驱控一体化移动底盘、协作机器人、避障传感器系统、激光雷达导航系统、3D深度视觉系统和基于WIFI网络的通讯系统等组成,可通过示教器对机器人动作进行示教和在线编程,同时支持拖动示教。
-
具有碰撞防护功能,提供3个等级的碰撞防护等级,机器人检测到碰撞后自动停止。
-
平台融合了多种传感器数据采集、数据分析以及智能控制于一体,可以支持与部署当前流行的深度学习应用,是高级机器人研究和开发的综合性开源平台。
-
支持多种平台SDK二次开发,支持Linux下C++编程、Lua脚本语言编程、Windows VC++、Python脚本编程、QT跨平台编程开发。
-
移动底盘采用四轮四驱结构,通过改变两侧车轮的方向和速度,实现前进、后退、差速转弯及原地转向。
-
基于STM32的主控系统集成了四路驱动,通过串口向用户层实时反馈编码器和IMU信息,可实现机器人的定位导航。
-
搭载双Jestson TX1系统,预装ubuntu 18.04 系统,并安装了 ros melodic元操作系统;可以在学习各种AI算法的同时,学习ROS 生态下的各种自动驾驶导航算法;一套用于单独研究导航算法,一套用于辅助视觉AI算法,可以提升整体系统的性能。