产品概述
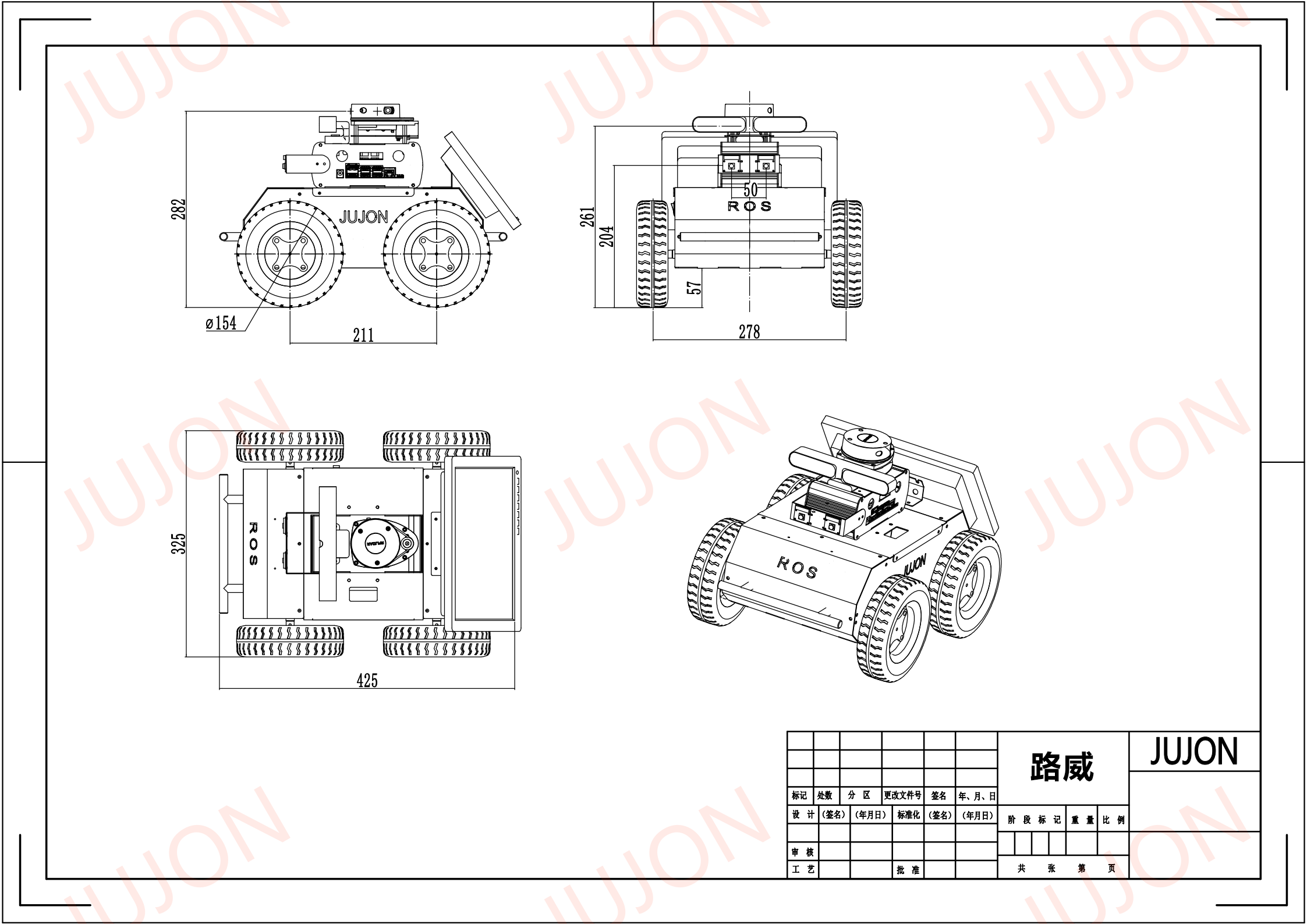
路威(Ravelle)是巨匠公司潜心研发的一款专门用于 ROS、自动驾驶等技术学习的入门级套装产品。
采用四轮四驱移动底盘,搭载英伟达最具性价比的学习套件NVIDIA Jestson Nano,可实现激光SLAM导航、图像识别、视觉跟踪等功能。
本产品是学习STM32运动控制、机器人操作系统(ROS)、自动驾驶等技术的最佳平台,适合高校教学,实验室研究,企业算法原型验证。

路威(Ravelle)是巨匠公司潜心研发的一款专门用于 ROS、自动驾驶等技术学习的入门级套装产品。
采用四轮四驱移动底盘,搭载英伟达最具性价比的学习套件NVIDIA Jestson Nano,可实现激光SLAM导航、图像识别、视觉跟踪等功能。
本产品是学习STM32运动控制、机器人操作系统(ROS)、自动驾驶等技术的最佳平台,适合高校教学,实验室研究,企业算法原型验证。